AGV的起源 AGV的起源 动导引辆(AGV),作为现代物流和自动化领域的重要组成部分,其起源和发展历程值得详细探讨。 AGV的最早出现可以追溯到20世纪50年代。1953年,巴雷特电⼦公司(Barrett Electronics)在美国伊 利诺伊州诺斯布鲁克开发了世界上第⼀辆商⽤AGV。这⼀创新是在第⼆次世界⼤战后,随着⼯业⾃动化 的兴起和技术的进步⽽产⽣的。当时,⼯业界正寻求提⾼效率和减少⼈⼯劳动的⽅法,AGV应运⽽⽣, 成为解决这些挑战的关键⼯具之⼀。
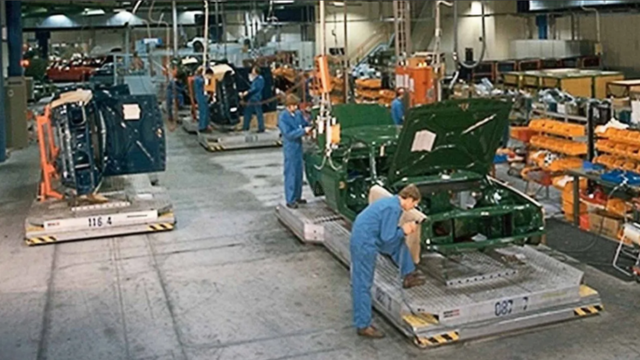
第⼀台AGV 最初的AGV是为了在⼯⼚或仓库中搬运重物⽽设计的。这些早期的AGV通常是线控的,即通过地⾯上的 电线来引导路径。它们的基本功能包括⾃动搬运物料,从⼀个指定的起点到达⼀个预定的终点。这种⾃ 动化程度虽然有限,但在当时已经⼤⼤提⾼了物料搬运的效率和安全性。 导向技术的进步 20世纪70年代,AGV导向技术开始变得更加智能化,不再仅仅依靠感应地⾯的电磁频率进⾏运动。例 如,瑞典卡尔⻢的沃尔沃开始在1973年开发⾮同步装配设备,作为传统输送机装配线的替代品。该公司 开发了280台由计算机控制的AGV,标志着AGV开始迈向⾼智能化的重要⼀步。
沃尔沃开发的⾮同步装配设备 ⽆线式导引技术的出现 80年代后期,⽆线式导引技术引⼊到AGV系统中,例如利⽤激光和惯性进⾏导引,这⼤⼤提⾼了AGV系 统的灵活性,准确性,不再受地⾯的限制,当需要更改路径时,也不必打断⽣产。 全球第⼀辆激光导引⻋ 数字化、⽹络化的AGV 进⼊90年代,全世界的AGV⽣产⼚家已经超过100家,型号也达到上百种。此时的AGV决策处理能⼒越 来越强,可以执⾏⼈在管理材料处理过程中的决策和控制功能,AGV已经进⼊到⾼智能化,数字化,⽹ 络化,信息化的新时代。
现代各类型⾼智能AGV 现代各类型⾼智能AGV 由于微处理器技术的发展,我们现在看到的AGV系统已经能够进⾏更复杂的任务,⽐如进⾏精细的定位 计算,和现有设备进⾏智能交互等。AGV可以在许多⼯⼚和仓库中独⽴运⾏,也可以作为⼀种更⼤系统 的⼀部分运作,提供了⼴泛的运⽤领域。 随着技术的发展,AGV的功能和使⽤场景也逐渐扩展。从最初的线控引导,发展到后来的磁带、激光导 航、视觉导航等多种导航技术。AGV的应⽤领域也从单⼀的⼯业⽣产线扩展到医院、机场、仓库管理等 多个领域。例如,在医院中,AGV可以⽤来运送药品、样本或餐⻝;在机场,AGV则可⽤于⾏李处理 等。 AGV的发展反映了⼯业⾃动化和智能化的整体趋势。从最初的简单功能到现在的⾼度智能化和多样化应 ⽤,AGV已经成为现代物流和⽣产系统中不可或缺的⼀部分。随着技术的不断进步,我们可以预⻅AGV 在未来将发挥更加重要的作⽤。 |


















D-Think_ZT01加强型芯片注射器,PIT连续注
D-Think_ZT01-14T 1.4*8mm FDX-B植入式生物