AGV小车在自动化领域里应用很广,现在的 AGV小车都是智能化的,能根据路径自动行走、转向,在搬运过程中,如果有障碍物或空间不足时,可以自动绕行,也可以实现自动停取。 AGV的运动控制系统是由软件和硬件组成的复杂系统。软件部分包括路径规划、动态调度、运动算法等模块,用于实现AGV的运动控制和路径优化。硬件部分包括传感器、驱动器、电机等设备,负责采集环境信息、实时控制车辆的运动。
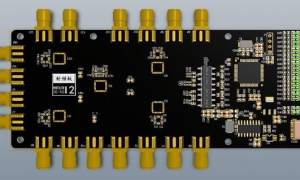
AGV小车由多个电机驱动,每个电机都有一个驱动器控制,使其按照一定的路径行走。当运行到预定的位置时,控制器控制各个电机运转,使 AGV小车行走到指定位置。小车上有一些传感器,例如陀螺仪、地磁、距离传感器等用来感知周围环境的变化。在传感器与控制器之间还有一个无线通信模块。小车运行时会通过无线通信模块与上位机通信,并且在上位机中设置运动路径、运行速度等参数。 控制系统结构 AGV小车是一个自动控制系统,它的主要功能是控制小车的运动,实现自主导航、避障、自动行进等功能,而且具有与其他控制系统和设备进行信息交换的能力。它由多个传感器组成,如:位置传感器、距离传感器等。 小车的硬件组成 小车的硬件结构如图2所示,小车的四个电机通过4根导轨与车身连接。小车上的传感器用于感知周围环境,控制小车行走。小车上还装有无线通信模块,通过无线通信模块与上位机通信。上位机接收到信号后,经过处理后,再通过无线通信模块传递给小车的驱动器,通过电机驱动小车的各个部件运行。 在调试过程中,小车可能会出现一些小问题。如不能很好的对位,造成运动混乱等问题。此时可在上位机中设置相应参数来解决这些问题。
在调试过程中,当遇到无法解决的问题时,可以查阅相关资料并联系相关人员解决问题,直到问题得到解决。 上位机软件设计 上位机软件使用 WinCC组态软件,设计界面,并编程实现。上位机的主要功能包括:运动路径规划、运行速度设置、报警设置等。上位机的主要任务是控制小车按预定路径运行,并在运行中检测小车运行状况,如果有故障或障碍物等异常情况,能及时发出报警。 上位机中有多个菜单栏,分别对应不同的功能,可以根据自己的需要设置不同的菜单栏。通过上位机串口通讯功能将数据发送到单片机中,单片机控制各个电机的运转来控制小车的运动。 通讯协议的制定 AGV小车的控制器和上位机间采用串行通信,是指控制器与计算机之间或计算机与计算机之间用一条数据线进行数据交换的一种方式,由于采用的是串行通信,所以称为串行通信,为了能够使小车按照给定的路径运行,需要制定相应的通讯协议。 小车运行轨迹规划 对于 AGV小车的运行轨迹规划,一般都是采用圆弧作为轨迹,圆弧的起点和终点分别为 AGV小车的起点和终点。在运动过程中,将 AGV小车运动轨迹规划为一个圆弧,通过控制电机的速度,使小车按照规定的路径运行。 根据运动要求,对 AGV小车进行运动学分析。在机器人运动过程中,运动学方程为: 其中: yt= xt+μ(t为时间间隔)。根据这个方程,可以求出直线轨迹和圆弧轨迹。 根据以上分析可知:直线轨迹由直线驱动电机控制,可以直接控制;圆弧轨迹由圆弧驱动电机控制,通过计算得到不同的转角(A)后,采用角度法可以得到不同的直线运动轨迹;采用速度法可以得到不同的直线运动轨迹。
综上所述,AGV运动控制系统是实现智能物流运输的重要组成部分。其基本原理和功能包括路径规划、动态调度和运动算法等。通过该系统,AGV能够在复杂的环境中实现精确、高效的运输,提高物流的自动化水平和效益。随着科技的不断进步,AGV运动控制系统将继续发展,并在物流领域发挥更加重要的作用。 |


















D-Think_ZT01加强型芯片注射器,PIT连续注
D-Think_ZT01-14T 1.4*8mm FDX-B植入式生物